Quadropod - New version
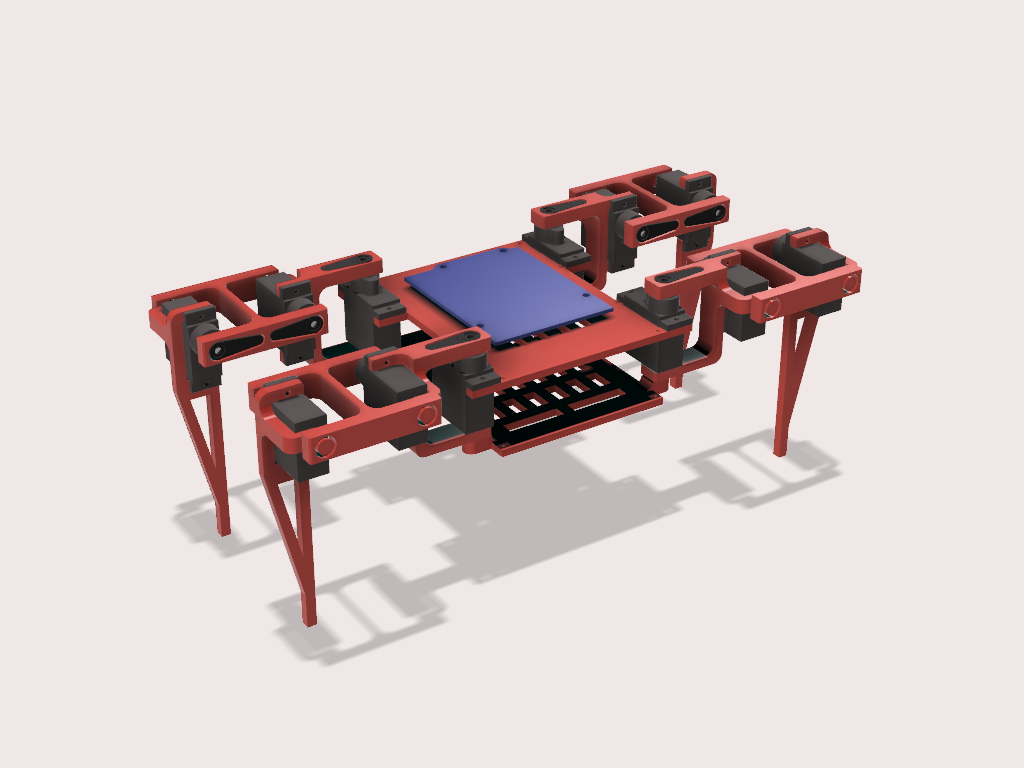
This is the second generation of Quadropod. Features:
-
Replaced logic board. Moved from ESP32 to Arduino UNO + Servo Shield (16 servo, 2 DC motors). Although nice, ESP32 was giving me headaches with generated PWM for servo. Sometimes the signal was interrupted, giving wrong position to a servo. Plastic gears didn’t like that at all. 3 servos went out of order.
-
Upgraded motors from SG90 with plastic gears to MG90S with metal ones for more reliability and power.
-
Upgraded design of some plastic parts. Replaced parts that required extra assembly with solid ones.
-
Tips of the legs can now be augmented with rubber pads for more control on slippery surfaces.
Printing and assembling…