
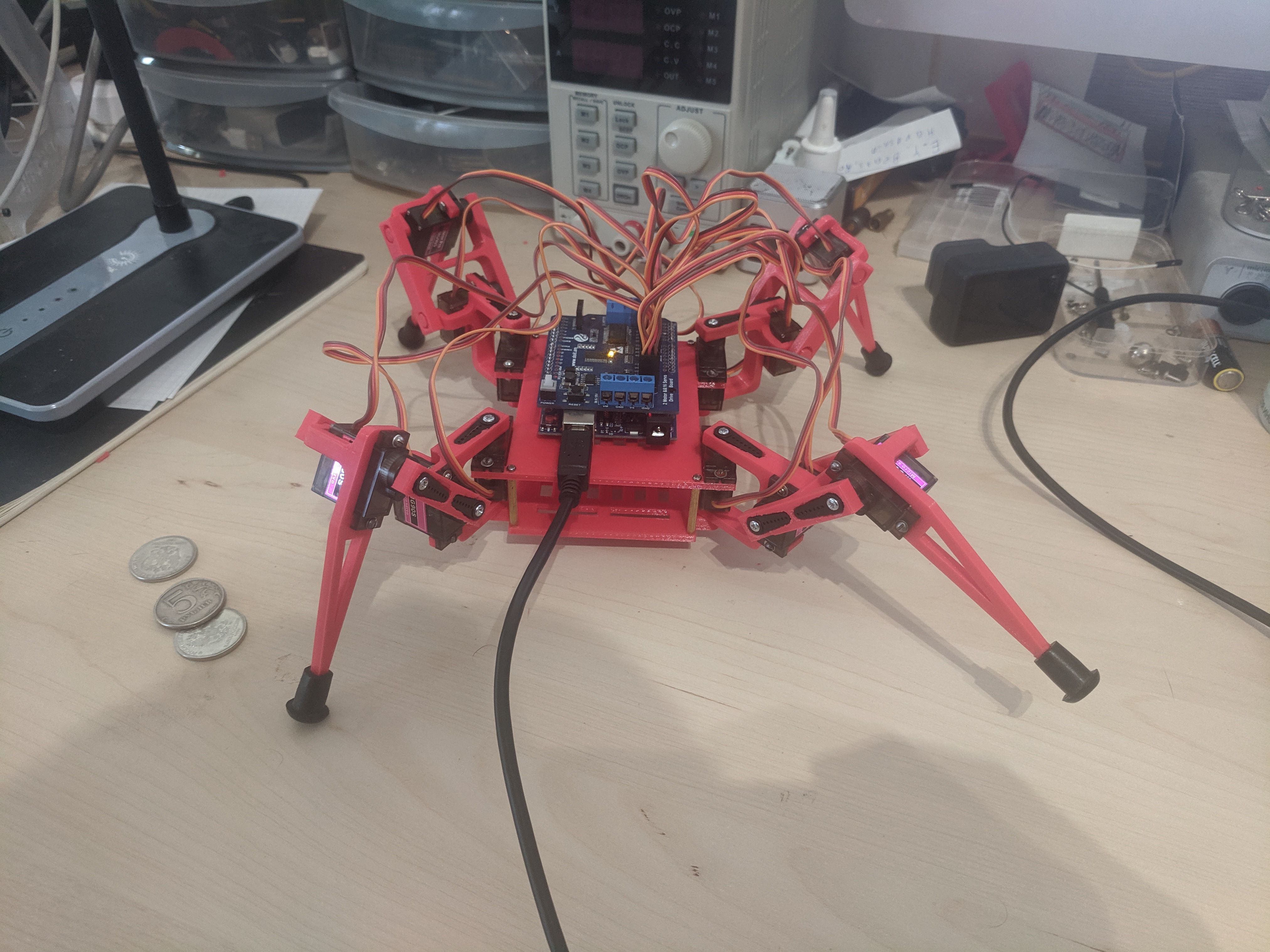
Quadropod - First moves
Parts printing and assembly has finished. After initial calibration, I’m now writing simple scripts to see the limits of the platform. We started with push ups:
With that done I’ve looked into how to lift the leg without tipping over. It took a bit of time to figure out the angles of the rest of the legs so that the center of mass shifted backwards slightly.
At this point I start to believe I’ll need to write a library with some geometry calculations in it. Doesn’t come as easy as I imagined starting this project. LOL.